Fog Detection using GOES-16 Channel Differences
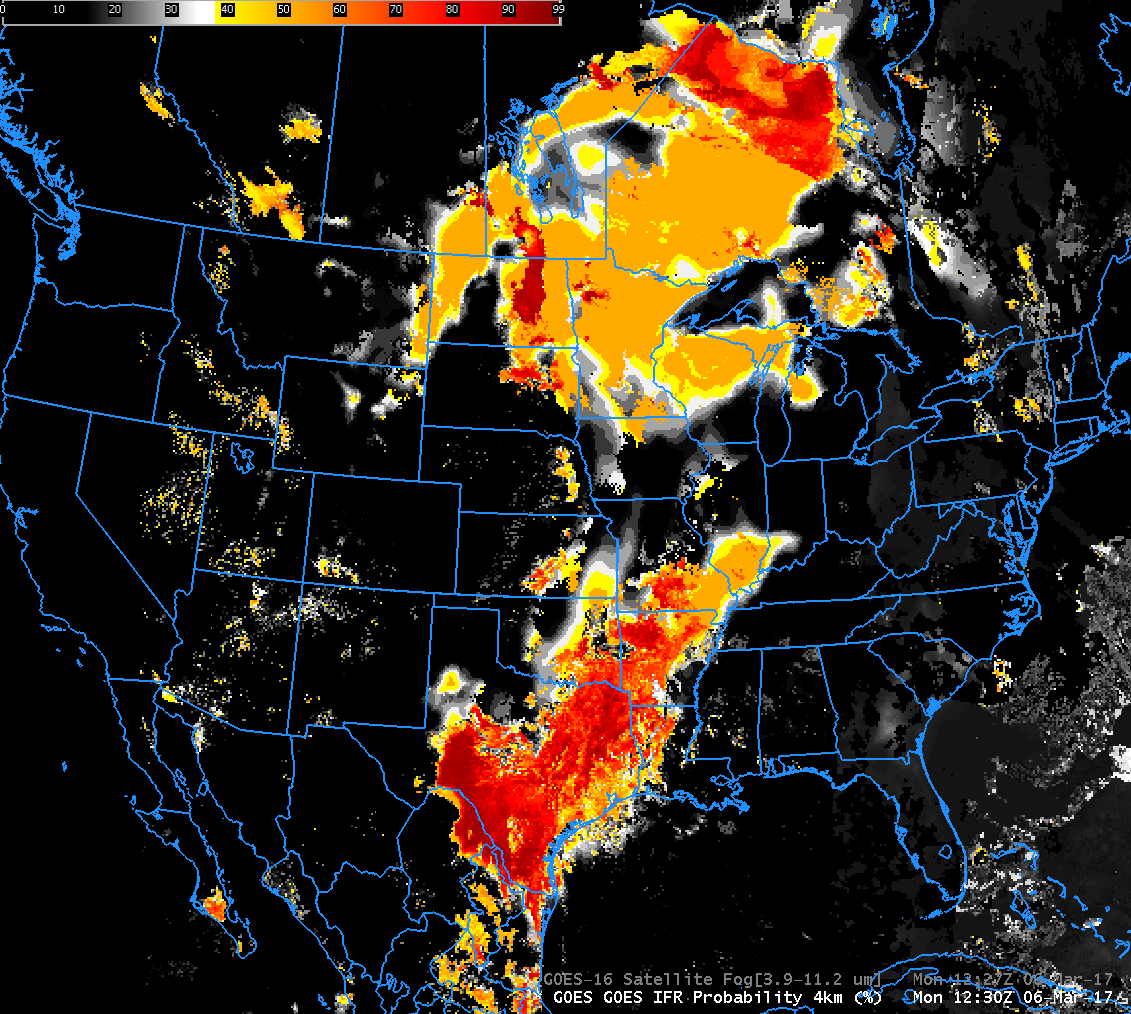
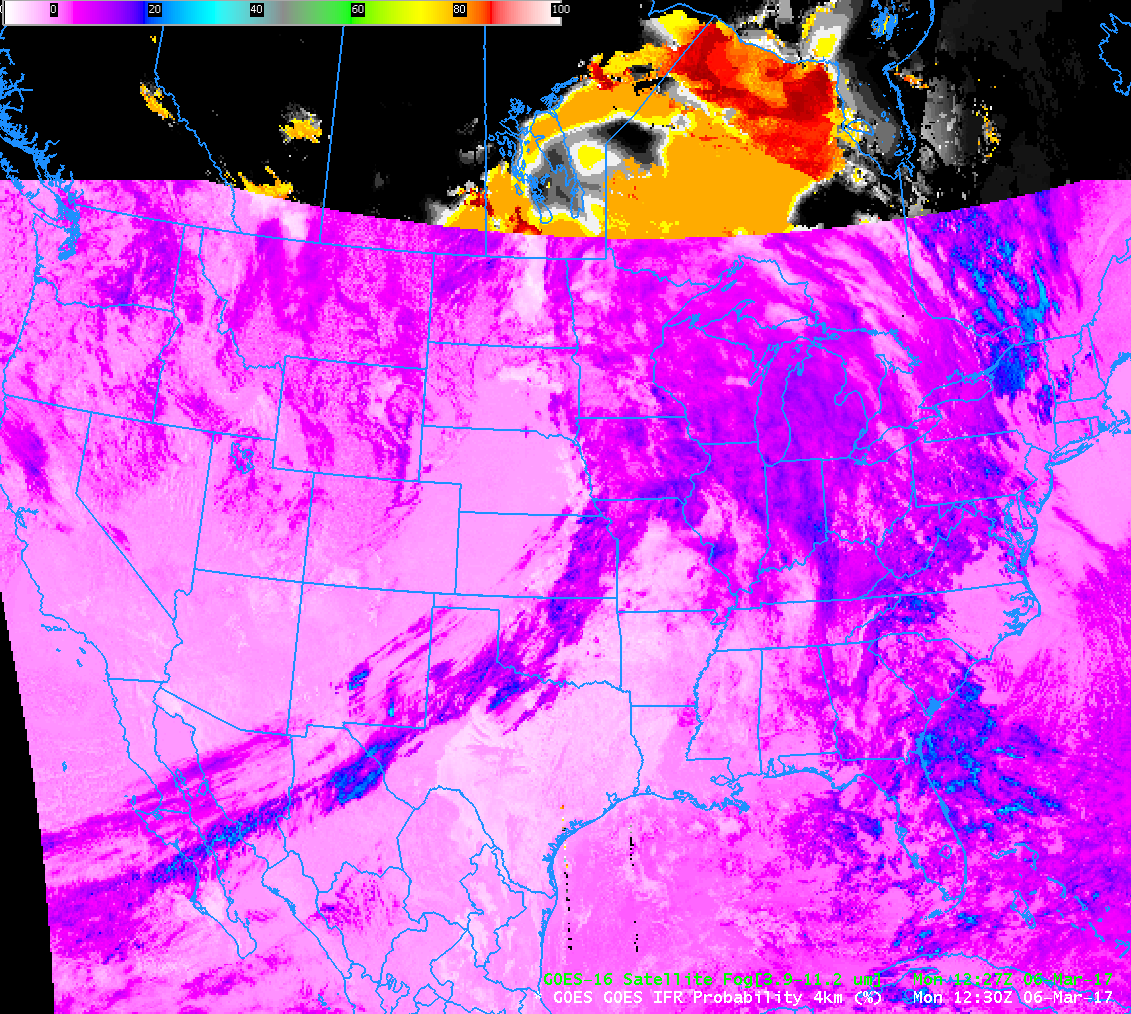
GOES-R IFR Probability Fields at 1230 UTC on 6 March 2017 (Click to enlarge)
Note: GOES-16 data shown on this page are preliminary, non-operational data and are undergoing on-orbit testing.
Here is what this blog post will show: It is vital to tweak the supplied default AWIPS Enhancements so that important atmospheric information is better highlighted.
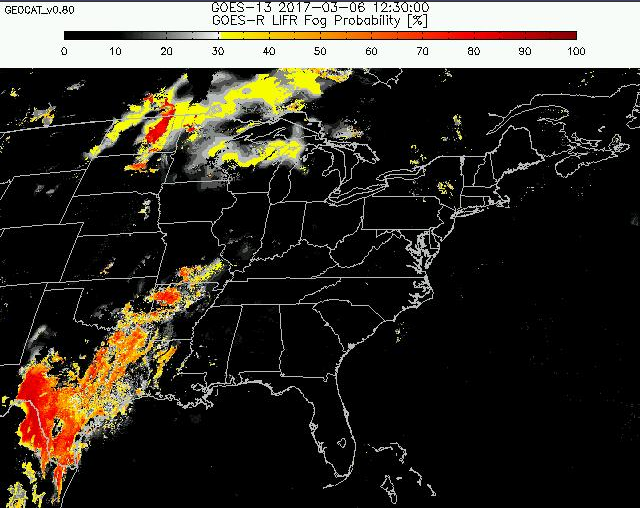
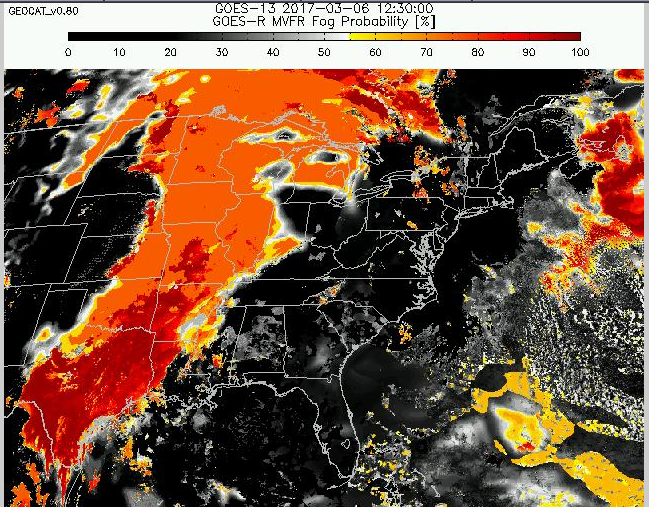
GOES-R IFR Probability fields (Click here for a website that shows many examples), shown above, use present GOES Data and Rapid Refresh Data to forecast the probability that IFR conditions exist. (There are also Low IFR Probability fields and Marginal VFR Probability fields as well, data from this site). The inclusion of surface information via the Rapid Refresh Model output (that details low-level saturation) is vital to screen out false fog detection (regions where mid-level stratus does not extend to the surface) and to highlight IFR conditions that exist under cirrus that block the satellite detection of low clouds.
{kind=link}
{kind=link}
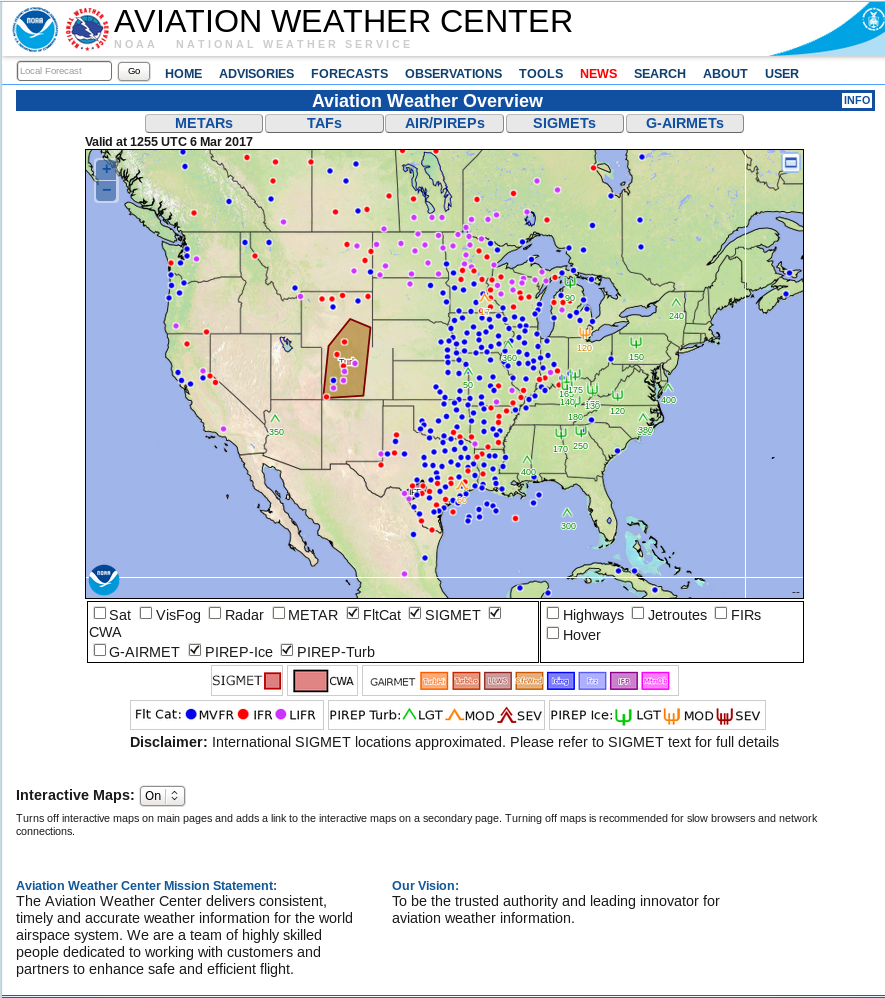
GOES-16 data in AWIPS includes pre-defined channel differences judged to have utility in Decision Support Services. One of these is Fog detection (the infrared Brightness Temperature Difference between 3.9 µm and 11.2 µm) that extracts information at night based on emissivity differences from water-based clouds at those two wavelengths. This is a product that can detect stratus clouds at night, if cirrus clouds do not block the satellite’s view. If those stratus clouds extend to the surface, then fog is a result. A GOES-16 Channel Difference field, shown below with the default AWIPS enhancement, contains information about the fog/low clouds that are present over North Dakota, and over Texas (click here for a graphic from the Aviation Weather Center that highlights regions of IFR conditions — Dense Fog Advisories were issued on 6 March over North Dakota).
{kind=link}
{kind=link}
The Fog signal in the Brightness Temperature Difference field at night occurs when the value is negative; the default color enhancement, below, contains a lot of color gradations that grab the eye in regions where the Brightness Temperature Difference is positive; for Fog Detection, those extra colors in regions of positive difference are needless visual clutter.
Brightness Temperature Difference fields (3.9 µm – 11.2 µm) over the United States, 1227 UTC on 6 March 2017 (Click to enlarge)
To get useful information from this field, alter the Brightness Temperature Difference enhancement to highlight negative values. That has been done in the toggle below with the IFR Probability field. Fog regions over North Dakota and Texas are apparent. (Note that the scale for the Brightness Temperature Difference field here has also been flipped — click here to toggle between the two Brightness Temperature Difference field enhancements).
{kind=link}
GOES-R IFR Probability fields and GOES-16 Brightness Temperature Difference fields, ~1230 UTC on 6 March 2017 (Click to enlarge)
It is vital to tweak the supplied default AWIPS Enhancements so that important atmospheric information is better highlighted.