Fog detection with multiple cloud layers
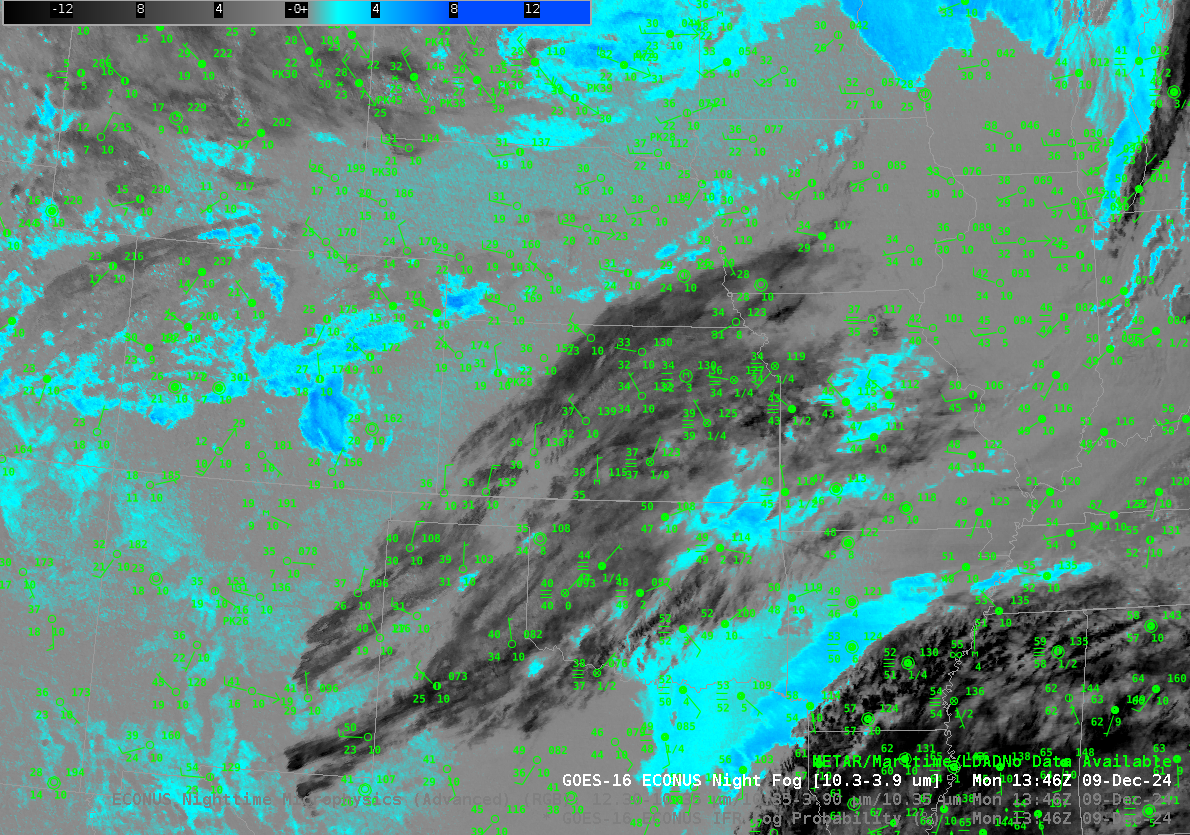
Fog and Low Clouds are an important hazard with respect to air and surface travel. How can these obstructions to visibility be highlighted from satellite? The toggle above shows the Night Fog Brightness Temperature Difference and the Night Microphysics RGB, popular satellite products to detect regions of fog. Blue regions in the Night Fog brightness temperature difference are regions where clouds with liquid water droplets exist: the brightness temperature difference is much larger than zero because liquid cloud droplets do not emit 3.9 µm energy as a blackbody would, but those same cloud droplets do emit 10.3 µm energy nearly as a blackbody would. The conversion of the radiation sensed by the satellite assumes blackbody emissions, so that the 10.3 µm brightness temperature is close to the cloud-top temperature, but the 3.9 µm brightness temperature (at night) is significantly colder. This brightness temperature is the ‘green’ component to the Night Microphysics RGB: low clouds will show as yellow where the atmosphere is relatively cold (for example over northwest Wisconsin and east-central Colorado) and more of a cyan color where the atmosphere is comparatively warm (central to southwestern Arkansas, for example). Are these the only regions where you might expect fog? What is happening under the high clouds over Oklahoma (depicted as red in the RGB) or the mid-level clouds over Mississippi (purple in the RGB)? One could look at surface observations, as shown below in the toggle, or at webcams, to determine where fog exists. The toggle below shows that fog exists under the high clouds (black enhancement) and under low clouds (blue/cyan enhancement), but the Brightness Temperature Difference field (and the RGB) have very different signals.
{kind=link}
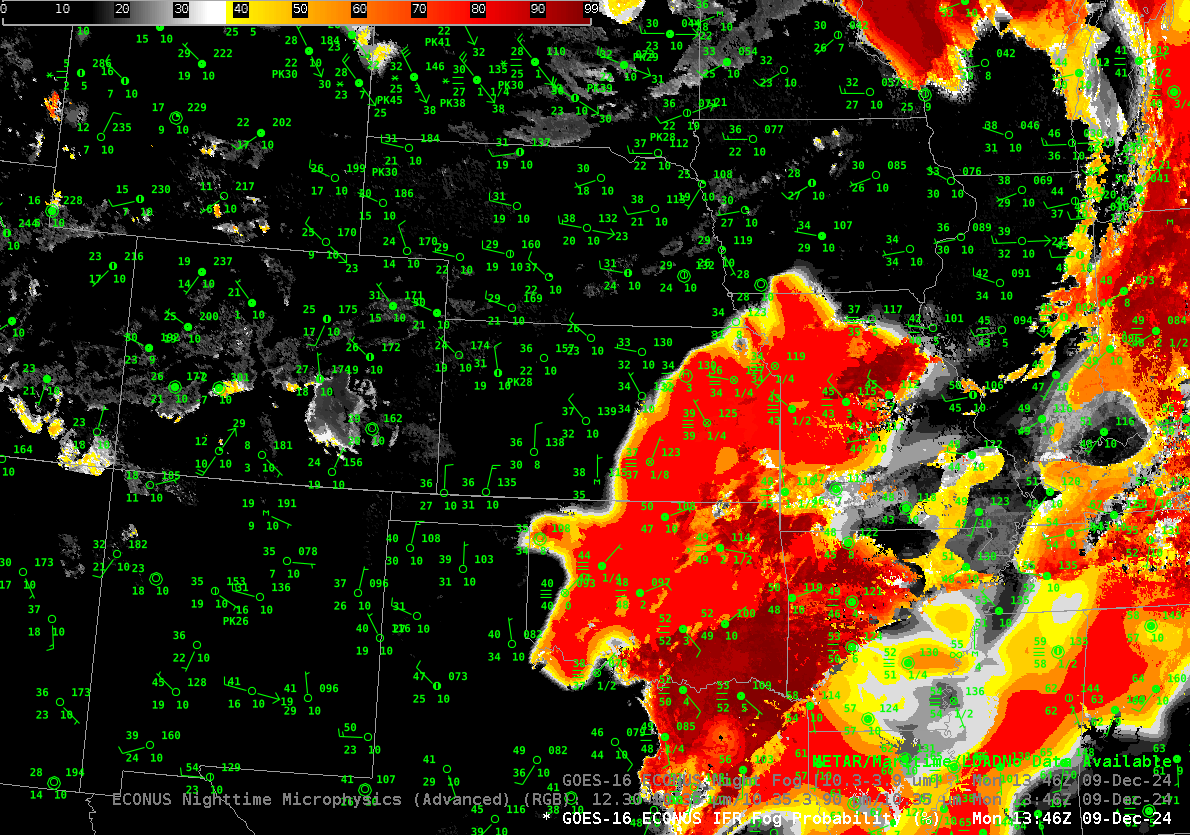
GOES-R has a level-2 Fog/Low Cloud detection product, IFR Probability. It combines information about clouds (from the satellite) with information about low-level saturation from the Rapid Refresh Model. The toggle below shows IFR Probability fields with observations. The flat solid orange field over central Oklahoma northeastward to Kansas City is a typical look for the field that is driven mainly by model output — this is where high clouds prevent infrared satellite detection of low-level clouds, but because low-level model fields are near saturation, it’s likely that IFR conditions are present (as shown in the observations). The deeper red values over southeast Oklahoma and parts of the Red River valley is more pixelated, reflecting the ability of the satellite to detect low clouds in that region. Note also how the IFR Probability field has little signal over the clouds in southeastern CO — because the Rapid Refresh model there shows no low-level saturation: that cloud is likely stratus that is elevated off the surface.
{kind=link}
Make sure the satellite-based fog detection product you use is appropriate for the environment, and if possible, verify the satellite estimates with surface observations from airports, or webcams. Use every product available.