BRISK (Burned area Rapid Interim Severity RisK) maps aim to bridge the data latency gap in post-fire information to support rapid emergency response. Weather forecasters, hydrologists and emergency managers require maps of burn severity to assess post-fire hazards such as debris flows, landslides, flash flooding, and impacts to water quality. However, traditional burn severity maps, furnished by USGS and Forest Service BAER teams, can be delayed by weeks to months following fire ignition because they require clear-sky passes of high-resolution sensors, and field-validation campaigns by ground teams. In this interim period, BRISK maps fuse together the best-available clear-sky satellite data from multiple sensors. The automated BRISK algorithm is designed to map all large fires daily, ensuring timely information for rapid emergency response until (and if) traditional burn severity maps become available.
First, wildland fire incidents are identified by the Wildland Fire Interagency Geospatial Services (WFIGS) Group under the National Interagency Fire Center (NIFC) program. The algorithm filters incidents to include only wildland fires currently over 5,000 acres occuring within the Contiguous United States (CONUS). The most current WFIGS fire perimeter is used to identify the region of interest to initialize our BRISK mapping algorithm. In addition, the vicinity outside of the known perimeter is scanned for new active fires detected by VIIRS sensors to ensure map coverage for all new fire growth.
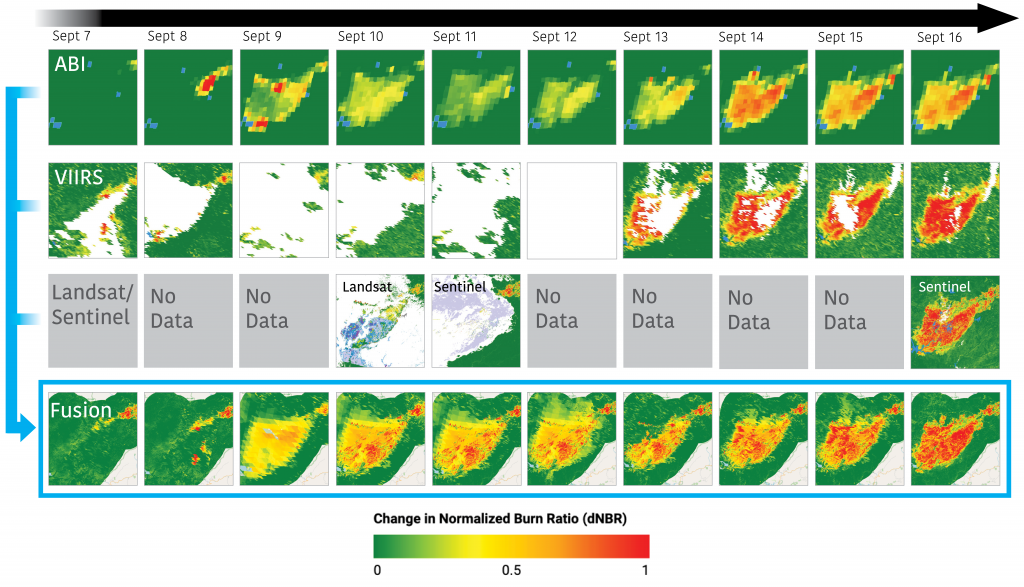
BRISK maps are multi-sensor multi-scale dNBR composite images. The delta Normalized Burn Severity (dNBR) index captures the difference in burn effects on vegetation and soil from before the fire (pre-fire) to the current date (post-fire). The dNBR index leverages the different reflective signals at the near-infrared (0.86µm) and shortwave infrared (2.2µm) bands. Imagery is retrieved from four sensors: GOES-18/19 ABI, NOAA-20/NOAA-21 VIIRS, Sentinel-2a/b MSI and Landsat 8/9 OLI. The GOES satellites are geostationary and scan CONUS every five minutes at a resolution of 2km. VIIRS, Sentinel-2 and Landsat are polar-orbiting and pass over CONUS once per day, every 5 days, and every 8 days, respectively, at spatial resolutions of 375m, 30m and 20m. Each day, all the cloud-free dNBR imagery from these sensors is calibrated and composited, giving preference to the pixels that are most timely and have higher spatial resolution. The resulting BRISK map is coarse at first, and becomes more refined as the higher resolution sensors achieve clear-sky passes.
BRISK Maps in Action:
“I have been able to make use of the BRISK map for the Madre burn area in San Luis Obispo County in my forecast area here in Southern California. The BAER team is currently assessing the burn area, but I was able to access your information in advance. We have a slight chance of thunderstorms in the vicinity of the burn area in the next few days and this does provide us with some advanced intel regarding areas of potential high risk, especially along Highway 166.”
July 16, 2025
Jayme Laber
Senior Service Hydrologist
NOAA National Weather Service