

Cloud Overlap Detection Approach
Given that the occurrence of thin cirrus over a lower-level cloud is fairly common, and that it causes errors in the cloud retrievals, we've been working towards rectifying the situation. The first step is knowing where thin cirrus overlies low-level clouds in the imager data. Towards this end, there may be some interest in recent progress towards the detection of multilayered clouds. The theoretical basis for the approach is described by Baum and Spinhirne (2000), who apply a cloud overlap discrimination method to high-resolution (50 m) MODIS Airborne Simulator (MAS) data for a scene in which optically thin cirrus was present above a lower-level water cloud. Their approach assumes that both a cloud mask and a cloud phase product are available as input. The subsequent cloud overlap discrimination is performed on an array of data, specifically using a near-infrared band (NIR, 1.6 µm) and an IR band (11 µm). In this first study, each pixel is tested only once for the presence of overlapping cloud layers.
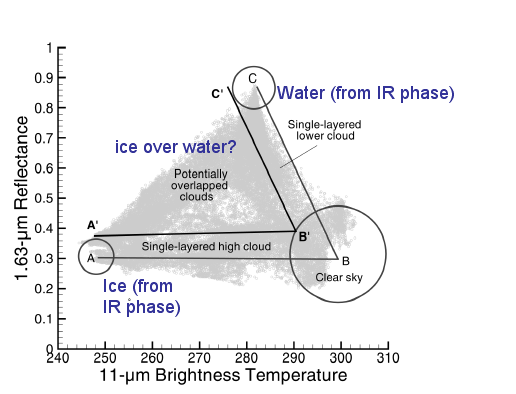
The methodology is based on two observations about ice and water clouds. The first observation is that ice crystals tend to absorb more radiation at 1.6 µm than water droplets. This means that ice clouds tend to be less reflective than water clouds at 1.6 µm. The second observation is that ice clouds tend to reside higher in the tropoposphere than water clouds; hence ice clouds of higher optical thickness tend to have lower 11-µm brightness temperatures than water clouds. The specific assumptions invoked by Baum and Spinhirne (2000) are that
- at most two distinct cloud layers are present in an array of data,
- any pixels not uniquely associated with either of the two distinct cloud layers are classified as containing potentially multilayered clouds,
- the uppermost cloud layer is ice and the lower-level cloud layer is composed of water droplets, and
- a separation distance of at least 2 km in height exists between the layers.
Below is an example derived from MODIS Airborne Simulator (MAS) data that was collected during a field experiment in April-May held in the central United States. The MAS imager was on the NASA ER-2 aircraft. This imager takes multispectral data at 50-m spatial resolution.

A bispectral scatterplot of the data within the array outlined in the above image follows below.

The pixels within the circles are labeled "A" (ice cloud pixels), "B" (clear-sky pixels), and "C" (water cloud pixels). Based on the means and standard deviations (represented by the circled data), one can imagine separating the clouds/clear-sky as follows:
Recently, the approach has been modified for application to MODIS data (1-km spatial resolution) as follows.
- Clear-sky pixels are identified from the operational MODIS cloud mask product (MOD35).
- Cloud thermodynamic phase is based upon the brightness temperature difference between two bands located at 8.5 and 11 µm, hereafter denoted as BTD[8.5-11]. This is the same method as that used to infer cloud phase in the MOD06 operational product. However, the MOD06 cloud phase results are provided at a lower spatial resolution of 5 km.
- Tests show that either the 1.6- or 2.1-µm bands NIR bands may be used reliably for cloud overlap detection. Since the 1.6-µm band on the Aqua MODIS instrument has performance issues (many unusable detectors), the 2.1-µm band is used instead.
- Data arrays of size 200x200 pixels are processed, in addition to a tiling approach wherein the array is staggered over the image. This approach allows each pixel to be tested for cloud overlap multiple times.
Testing each pixel multiple times by moving an array across/down the data granule
As shown in Nasiri and Baum (2004), the following conditions must be met for each data array before application of the cloud overlap detection method. Each array must have evidence of the presence of: (a) clear-sky pixels, (b) ice cloud pixels, and (c) water cloud pixels. If there are no ice cloud pixels, for example, nothing further is done. The clear-sky pixels are provided by the MOD35 product at 1-km spatial resolution, and the IR phase algorithm provides the ice cloud/water cloud pixels. The operational cloud phase product (in MOD06) is calculated at a reduced resolution (5 km2) while for the cloud overlap product developed for MODIS Direct Broadcast data, we apply the IR phase algorithm to every 1-km pixel.
If each pixel is processed only once, it is difficult to gain a sense of the reliability of the algorithm. One way to provide a confidence level to our assessment of whether a pixel contains more than one cloud layer is to perform a tiling process, wherein each pixel array, or tile, is staggered across the data granule. By staggering the tiles over the image, each pixel (away from the granule borders) may be tested multiple times. In this fashion, a pixel may be flagged many times as containing multiple cloud layers. If a pixel is flagged as being "multilayered" more than once, it provides a greater sense of confidence that the methodology is working appropriately. In the MODIS direct broadcast imagery processed at the University of Wisconsin, the number of times each pixel is flagged as containing "overlapped clouds" is provided as a fractional percentage.