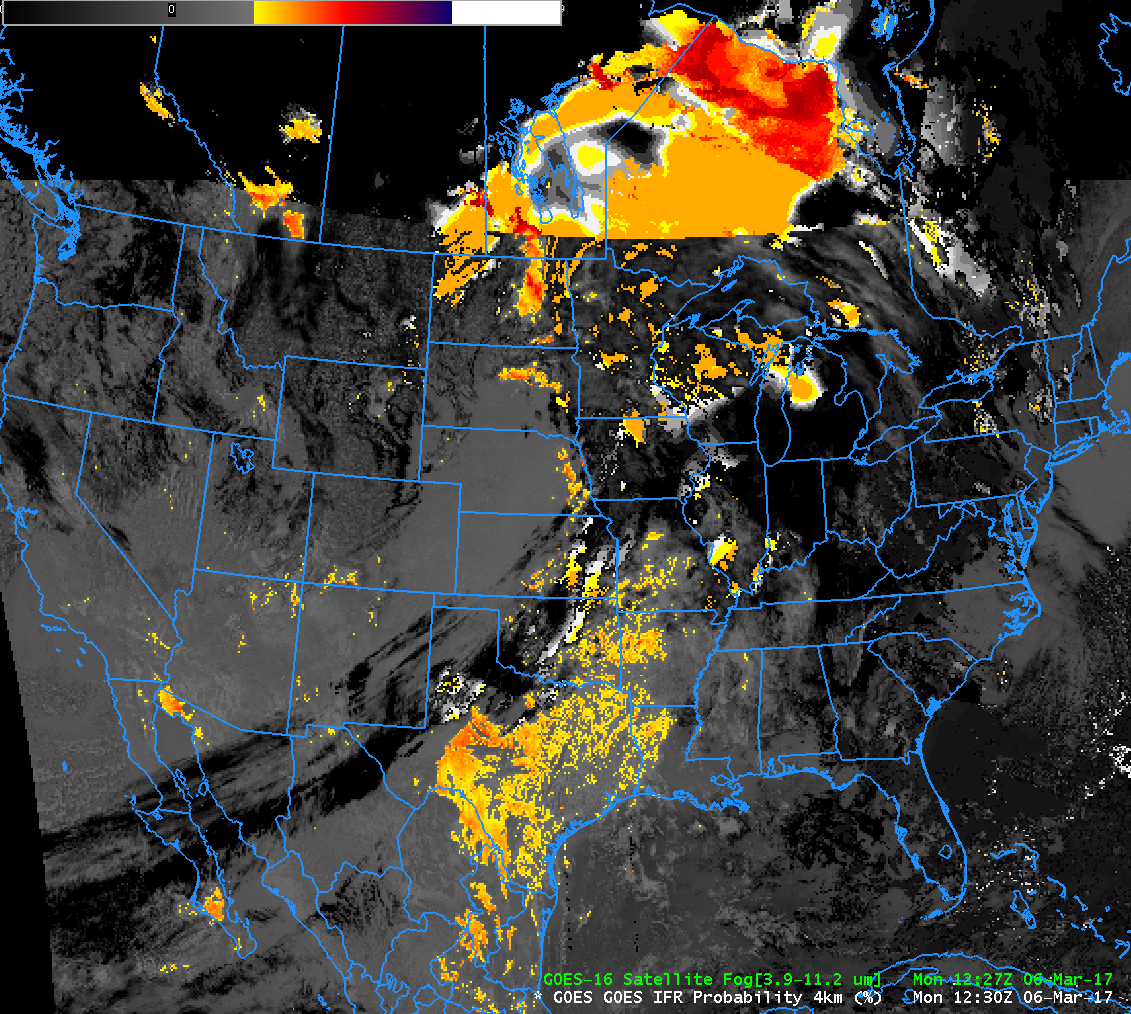
Grass fires in Kansas, Oklahoma and Texas
Widespread large grass fires began to burn across parts of northwestern Oklahoma, southwestern Kansas, and the Texas Panhandle on 06 March 2017. The fires grew very quickly during the late morning and early afternoon hours, due to strong southwesterly winds (with gusts as high as 67 mph in Oklahoma) behind a dryline... Read More